ROS Development Studio(ROSDS)を使ってROSに慣れてみる
こんにちは. 皆さんROS(Robot Operating System)使ってますか? 研究でロボティクスとかに取り組んでいる方には馴染みが深いかもしれませんね.僕も使っていはいますが「便利だなぁ」とか「やりたいことだいたいやられてるなぁ」とか「みんな頭いいなぁ」と感心しながら自分の無力さを噛み締めています(助けて).
最近では,unityかGazebo上でガンダムを動かそうとするプロジェクトが動いていたり,aiboがROSで開発されていたりとROSが使えると便利だとおもいます.
でもROSって環境構築したりするのめんどくさいですよね.仮想環境つくあったりデュアルブートにしたりしてLinux環境整備したりするのも大変だと思います(まぁROSなんて触ろうとする人の大半は私と違ってLinuxチョットデキル人が大半だと思いますが...) あとちょっとだけ触ってみたいなーという人も多いと思います. そんなあなたにROS Development Studioをおすすめしたいと思います.
ROS Development Studio(ROSDS)とは
ROSを予め用意してくれている仮想環境を用意してくれているサービスです.月30時間までなら無料で使えます.
| 無料 | 有料(月9ユーロ) | |
|---|---|---|
| 使える時間 | 月30時間 | 月60時間 |
| 作れるプライベートな仮想環境 | 3 | 無制限 |
| 保存容量 | 5 GB(projects + datasets) | 100 GB(datasets) |
| 仮想環境スペック | 2 core vCPU and no GPU | 2 core vCPU and no GPU |
といった感じでお試しで触るぐらいなら無料でいいのかなと言う感じ.他にも有料プランだと別途支払えば時間延長できたり,現実のロボットとつなぐことができたりGym computersと呼ばれるPC(機械学習で使う学習用?)が使えたりするそうです.
また,時間延長では
Medium GPU
8 vCPU + 2 CPU · 1500 CUDA Cores · 16 GB Memory
と
High GPU
32 vCPU + 4 GPU · 4 x 1500 CUDA Cores · 60 GB Memory
が選べるそうです.ここまで来たらAWSとか使うような気がするのですがどうなんでしょうか?
使ってみよう
1. アカウントを作成する
上からアクセスし,Get Startedに進むと

上記のサイトに飛ぶため,そこからSign Upから必要項目を埋めSign Upする.
 Sign Upするとこのような画面が表示されます.これでアカウントが作成されました.
Sign Upするとこのような画面が表示されます.これでアカウントが作成されました.
2. 環境を作る
New ROSjectから新しい仮想環境を作ります.
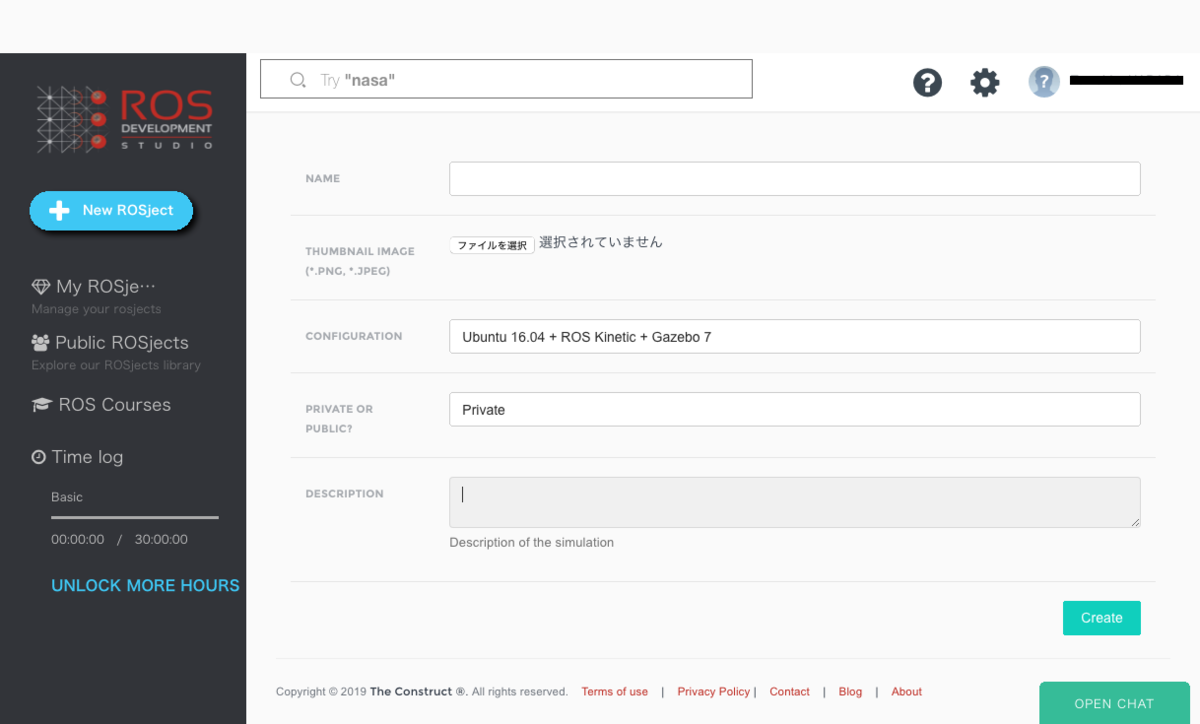 このような画面でほしい設定を選択してCreateを選択すれば仮想環境が作られます.
ちなみに,CONFIGURATIONは
このような画面でほしい設定を選択してCreateを選択すれば仮想環境が作られます.
ちなみに,CONFIGURATIONは
- Ubuntu16.04 + ROS Kinetic + Gazebo 7
- Ubuntu16.04 + ROS Kinetic + Gazebo 9
- Ubuntu18.04 + ROS Melodic + Gazebo 9
- Ubuntu18.04 + ROS2 Crystal
- Ubuntu16.04 + ROS Kinetic + Gazebo 7 + Testing
から選択できます.お好きなものを選択してください.ROS2があるのでちょっと試してみたいときとかに便利ですよね.
PRIVATE OR PUBLIC?ではprivateかpublicを選択すれば大丈夫です.ここはプランによってprivateの環境の数が上限に達して選択できなくなっていたりするので注意です.
3. ROSJectの簡単な使い方
ROSJectができたら実際に使ってみます.ホーム画面のMy ROSJectから作成されたプロジェクトを選択し,Open ROSJectから仮想環境を開きます.
 このような画面が表示されるはずです.
このような画面が表示されるはずです.
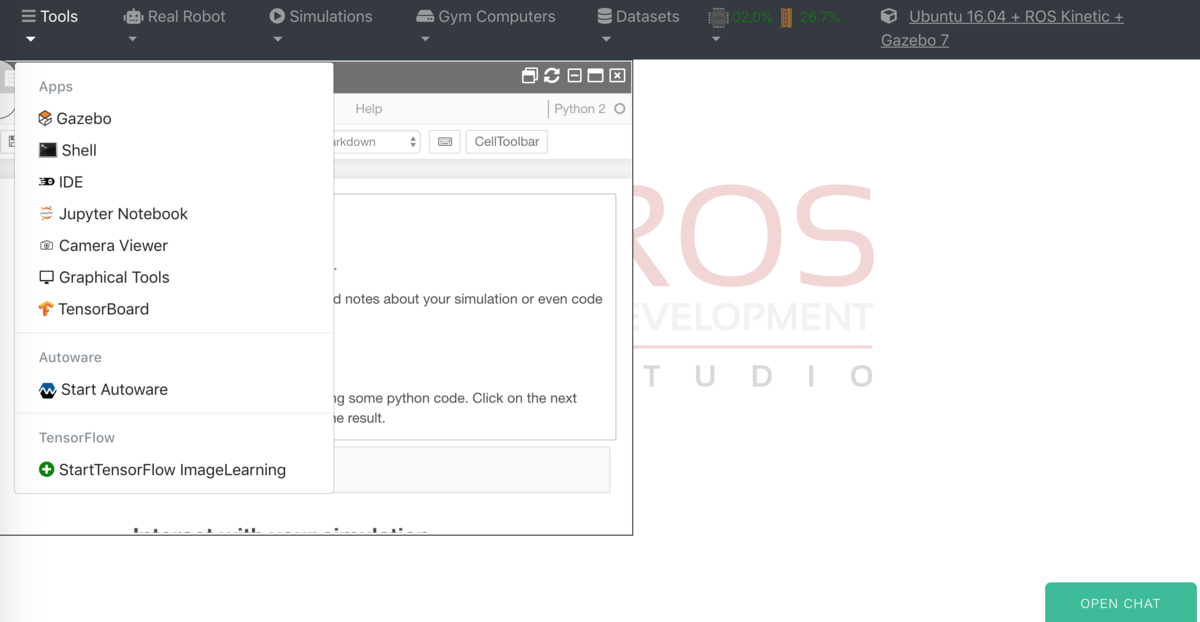 Toolsを選択すると上のように選択肢が現れます.
ここから必要なものを使用していきます.Linuxとあまり変わりません.
Toolsを選択すると上のように選択肢が現れます.
ここから必要なものを使用していきます.Linuxとあまり変わりません.
注意としては,rvizやrqt_graphを使用するにはGraphical Toolsを開いておく必要があります.Gazeboはそのまま表示されるのに不思議です.
 rvizを起動して,simulationsからお試しにkobukiを選択してセンサ情報を取得してみました.Simulationsに予め用意されているロボットも面白いものが多いので試してみるといいかもしれません.
rvizを起動して,simulationsからお試しにkobukiを選択してセンサ情報を取得してみました.Simulationsに予め用意されているロボットも面白いものが多いので試してみるといいかもしれません.
まとめ
ここまでできれば後はLinuxの知識とROSのwikiとかQiitaを読みながら遊ぶだけです.このサービスを提供しているThe Construct(?)さんはRobot Ignite Academyと呼ばれるROSやロボティクスの学習教材の提供もしているので利用してみてもいいかもしれません.また,YouTubeでもThe Constructというチャンネル名でROSDSを利用したROSの使い方を解説していたりするので参考までに.

